
ความหมายของเซอร์โว
เซอร์โว (servo) คือระบบการควบคุมแบบ close loop หรือเรียกว่า feedback control โดยการใช้เซอร์โวมอเตอร์เป็นตัวต้นกำลัง

System method
System method คือวีธีในการควบคุมระบบเซอร์โว มี 3 แบบดังรูป 1
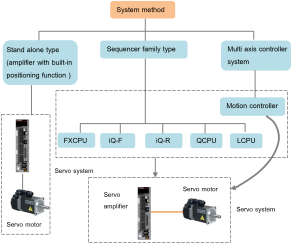 รูป 1
รูป 1
1. Stand alone type คือการใช้ servo amplifier ควบคุม servo system โดยไม่ต้องใช้ PLC หรือ controller อื่นๆช่วย เนื่องจากสามารถทำโปรแกรมได้ที่ตัว servo amplifier
2. Sequencer family type คือการใช้ PLC ควบคุม servo amplifier โดยใช้วิธีการเขียนโปรแกรม ladder (หนังสือเล่มนี้จะกล่าวเฉพาะการควบคุมแบบ sequencer family)
3. Multi axis controller system คือระบบการควบคุมมอเตอร์แบบหลายแกน ซึ่งมีความซับซ้อนสูง เหมาะสำหรับการใช้ Motion controller ในการควบคุม
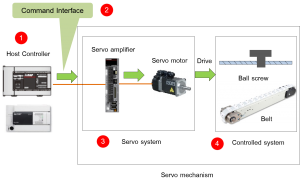
Sequencer family type
 รูป 2
รูป 2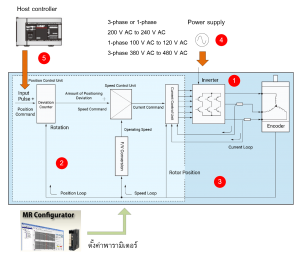
2. ชุด Electronic เพื่อทำหน้าที่ควบคุมชุด inverter ประกอบด้วย position control unit, speed control unit และ current control unit
3. ส่วนป้อนกลับ (feedback) ทำหน้าที่รับสัญญาณจาก encoder ของมอเตอร์เพื่อประมวลผลตำแหน่งและความเร็วของมอเตอร์
4. Power supply คือแหล่งจ่าย power ที่จ่ายให้ amplifier เพื่อขับเคลื่อนมอเตอร์
5. Input pulse คือ pulse train ที่จ่ายให้ servo amplifier
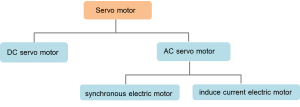
เซอร์โวมอเตอร์ (servo motor) คือมอเตอร์ที่สามารถควบคุมความเร็ว ตำแหน่ง และแรงบิดได้อย่างแม่นยำ เมื่อแบ่งตามประเภทการจ่ายไฟ เซอร์โวมอเตอร์มีสองแบบคือ DC servo motor และ AC servo motor สำหรับ AC servo motor แบ่งออกเป็นสองแบบคือ synchronous electric motor และ induce current electric motor
 รูป 4
รูป 4
1. DC servo motor
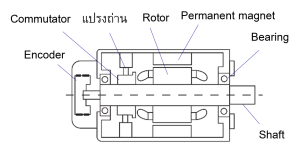
คือเซอร์โวมอเตอร์แบบไฟฟ้ากระแสตรง ทำงานโดยใช้ไฟฟ้ากระแสตรงสร้างสนามแม่เหล็กที่ stater ส่วนสนามแม่เหล็กที่ rotor ใช้แม่เหล็กถาวร นิยมใช้กับโหลดขนาดเล็ก เนื่องจากมีแรงบิดน้อย
-ข้อดีของ DC servo motor คือ
1. ระบบมีราคาต่ำกว่าแบบ AC เนื่องจาก servo amplifier ที่ใช้ควบคุมมอเตอร์ DC servo motor มีความซับซ้อนน้อยกว่าแบบ AC servo motor
-ข้อเสียของ DC servo motor คือ
1. ต้องมีการบำรุงรักษาเป็นระยะๆ เนื่องจากมีฝุ่นที่เกิดจากแปรงถ่าน
2. ไม่เหมาะกับโหลดที่ต้องใช้แรงบิดมาก
 รูป 5
รูป 5
2. AC servo motor
คือเซอร์โวมอเตอร์แบบไฟฟ้ากระแสสลับ ทำงานโดยใช้ไฟฟ้ากระแสสลับสร้างสนามแม่เหล็ก AC servo motor นิยมใช้งานมากกว่า DC servo motor เนื่องจากมีข้อดีคือ
1. ไม่ต้องมีการบำรุงรักษา เนื่องจากไม่มีแปรงถ่าน 2. ความเร็วรอบสูงกว่าแบบ DC servo motor และ 3. ทนต่อสภาพแวดล้อมได้ดี
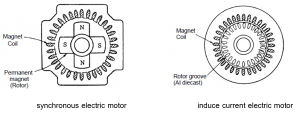
2.1 AC servo motor แบบ synchronous electric motor (SM) ทำงานโดยใช้สนามแม่เหล็กที่สร้างโดยขดลวด stator ตัดกับสนามแม่เหล็กที่ rotor สนามแม่เหล็กของ rotor ใช้แม่เหล็กถาวร เป็นมอเตอร์ที่นิยมใช้มากที่สุด
มีข้อดีคือ 1. มีประสิทธิภาพสูงในช่วง capacity ขนาดกลางและขนาดต่ำ
2. ทนต่อสภาพแวดล้อมได้ดี
ข้อเสียคือ มีความเสี่ยงต่อการเสียหายของแม่เหล็กถาวร
2.2 AC servo motor แบบ induce current electric motor (IM) ทำงานโดยใช้สนามแม่เหล็กที่สร้างโดยขดลวด stator ส่วนสนามแม่เหล็กของ rotor ใช้หลักการสร้างสนามแม่เหล็กแบบเหนี่ยวนำ เช่นเดียวกับ induction motor
มีข้อดีคือ
1. ในช่วง capacity สูงจะได้ประสิทธิภาพสูง คือให้ความเร็วสูง และแรงบิดสูง ดังนั้นจึงนิยมใช้ในงานที่ต้องใช้กำลังไฟฟ้ามาก
ข้อเสียคือ
1. กรณีแหล่งจ่ายไฟถูกตัด การเบรกมอเตอร์จะทำได้ยากกว่า synchronous electric motor
2. คุณลักษณะการทำงาน เปลี่ยนแปลงตามอุณหภูมิ
 รูป 6
รูป 6
รูปที่ 6 แสดงหน้าตัด stator และ rotor ของ SM motor และ IM motor
 รูป 7
รูป 7
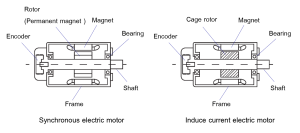
รูปที่ 7 แสดงโครงสร้างของ AC servo motor แบบ synchronous electric motor และ induce current electric motor
Mitsubishi Servo motor
เซอร์โวมอเตอร์มิตซูบิชิมี 3 แบบคือ rotary servo motor, linear servo motor และ direct drive motor ( แบ่งตามลักษณะการเคลื่อนที่ )
 รูป 8
รูป 8
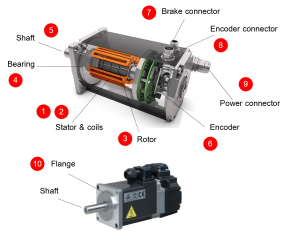
Rotary servo motor (AC servo motor )
rotary servo motor หรือเรียกว่าสั้นๆว่า servo motor ก็ได้ (ถ้าเข้าใจตรงกันว่าหมายถึง rotary servo motor) ทำงานโดยใช้การหมุนของ rotor เพื่อนำไปขับโหลด
 รูป 9
รูป 9
1. Stator คือส่วนหยุดนิ่งที่ใช้สร้างสนามแม่เหล็กเคลื่อนที่ เพื่อขับ Rotor, stator ประกอบด้วยแผ่นเหล็กบางประกบกันโดยมีขดลวดพันรอบแผ่นเหล็ก
2. Coils เป็นขวดลวดสำหรับสร้างสนามแม่เหล็ก
3. Rotor คือส่วนที่หมุนในตัวมอเตอร์ ด้วยอำนาจสนามแม่เหล็ก
4. Bearing ใช้รองรับการหมุนของเพลา
5. Shaft คือเพลาของมอเตอร์ คือส่วนที่ต่อมาจาก Rotor ใช้สำหรับขับโหลด
6. Encoder คืออุปกรณ์ตรวจจับตำแหน่งการหมุนของเพลามอเตอร์
7. Brake connector คือจุดต่อกับระบบเบรกของมอเตอร์ ( มีเฉพาะบางรุ่น , มอเตอร์แบบที่มี electromagnetic brake)
8. Encoder connector คือจุดต่อกับ encoder ของมอเตอร์
9. Power connector คือจุดต่อสำหรับจ่ายไฟให้กับมอเตอร์
10. Flange หรือหน้าแปลน ใช้วัสดุคือ aluminum die cast ใช้สำหรับรองรับ bearing และใช้ยึดระหว่างตัวมอเตอร์และส่วนของโหลด
เปรียบเทียบระบบเซอร์โวและอินเวอร์เตอร์
เซอร์โวมอเตอร์ถูกออกแบบมาพิเศษสำหรับ inertial ของโรเตอร์ (J หรือ GD² ) และการตอบสนองทางไฟฟ้าเช่น การเปลี่ยนแปลงอย่างกระทันหันของแรงดันและกระแสจาก servo amplifier แม้แต่ servo amplifier ก็สามารถส่งคำสั่งไปยัง servo motor ได้อย่างรวดเร็วและแม่นยำ
 รูป 10
รูป 10
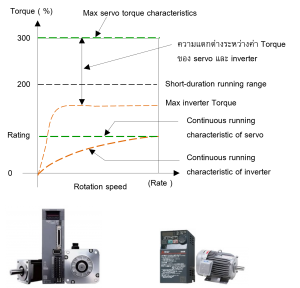
จากรูปที่ 10 กราฟของแรงบิดที่แปรผันตามความเร็วของมอเตอร์ เปรียบเทียบระหว่างเซอร์โวมอเตอร์มิตซูบิชิ กับมอเตอร์เหนี่ยวนำทั่วไป โดยมีความแตกต่าง 3 จุดคือ
1. แรงบิดของเซอร์โวมอเตอร์คงที่กว่าตั้งแต่ช่วงความเร็วต่ำถึงความเร็วพิกัด
2. แรงบิดสูงสุดมีค่ามากกว่า เช่นในรูป แรงบิดสูงสุดของเซอร์โวมอเตอร์สามารถทำได้ถึง 300% (ในระยะสั้นๆ) เซอร์โวมอเตอร์บางซีรีส์เช่น HG-KR, HG-KP ทำแรงบิดได้ 350%
3. การควบคุมความเร็วของเซอร์โวมอเตอร์มีช่วงที่กว้างกว่า
ความเฉื่อย (Inertia)
ความเฉื่อย (J หรือ GD² ) มีหน่วยเป็น kg ∙m² คือสภาพการต้านทานของวัตถุต่อการเปลี่ยนแปลงความเร็ว วัตถุที่มีมวลมาก ก็จะมีความเฉื่อยมาก รูปที่ 11 วัตถุมวลมากจะต้องใช้แรงที่มากขึ้นในการทำให้วัตถุเคลื่อนที่
 รูป 11
รูป 11
Moment of Inertia
โมเมนต์ความเฉื่อย (Moment of inertia ) คือสภาพการต้านทานของวัตถุต่อการหมุนหรือ เปลี่ยนแปลงความเร็วเชิงมุม มีหน่วยเป็น kg ∙ m² วัตถุที่มีมวลมาก หรือมีจุดศูนย์ถ่วงไกลจากจุดหมุน ก็จะมีโมเมนต์ความเฉื่อยมาก ซึ่งทำให้ต้องใช้แรงบิดมากเพื่อขับวัตถุนั้น
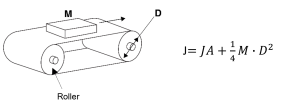
การเลือกใช้เซอร์โวมอเตอร์จะต้องพิจารณา inertia ของโหลดด้วย มอเตอร์แต่ละรุ่น ออกแบบเพื่อรองรับขนาด inertia ที่แตกต่างกัน รูปที่ 12 แสดงสมการหาค่า inertia ของโหลดแบบสายพาน
 รูป 12
รูป 12
J คือ inertia มีหน่วยเป็น kg∙m²
JA คือ โมเมนต์ความเฉื่อยของ roller (moment of inertia of the roller , kg∙m²)
D คือเส้นผ่านศูนย์กลางของ roller (m)
M คือมวลของ Load บนสายพาน (kg)
แรงบิด
แรงบิต (torque) คือแรงของมอเตอร์ที่ใช้ในการขับโหลด มีหน่วยเป็นนิวตันเมตร (N∙ m) เซอร์โวมอเตอร์ที่มีกำลังไฟฟ้ามาก ก็จะให้แรงบิดมาก แรงบิดจะมีค่าคงที่ ที่ระดับความเร็วช่วงนึงเท่านั้น เมื่อความเร็วมอเตอร์เพิ่มถึงจุดหนึ่ง แรงบิดจะลดลง
 รูปที่ 13
รูปที่ 13
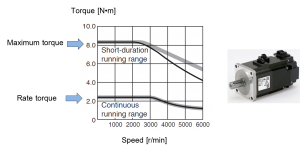
รูปที่ 13 กราฟความสัมพันธ์ระหว่างแรงบิดและความเร็วเซอร์โวมอเตอร์รุ่น HG-KR73(B) (ทั้งแบบมีเบรกและไม่มีเบรก) ขนาดกำลังไฟฟ้า 750W
กรณีมอเตอร์หมุนแบบต่อเนื่องที่ช่วงความเร็ว 0 ถึง 3000 rpm จะได้แรงบิดคงที่คือประมาณ 2.4 นิวตันเมตร ( แรงบิดกรณีนี้เรียกว่า rated torque) ถ้าความเร็วเกิน 3000 rpm แรงบิดจะลดลง ทำให้ความสามารถในการขับโหลดลดลง
เซอร์โวมอเตอร์สามารถเพิ่มแรงบิดได้มากสุดที่ 8.4 นิวตันเมตร (Maximum torque) ที่ความเร็วไม่เกิน 3000 rpm แต่เป็นการขับโหลดได้ในระยะเวลาสั้นๆเท่านั้น การทำงานแบบนี้เรียกว่า short-duration running
 รูปที่ 14
รูปที่ 14
สำหรับค่าความเฉื่อยของมอเตอร์จะแยกเป็นมอเตอร์รุ่นไม่มีเบรกกับรุ่นที่มีเบรก
เช่น HG-KR73 คือมอเตอร์แบบไม่มีเบรก จะมี moment of inertia เท่ากับ 1.26 ส่วน HG-KR73B คือมอเตอร์แบบมี electromagnetic brake จะมี moment of inertia เท่ากับ 1.37 ค่าต่างๆของมอเตอร์เช่น กำลังไฟฟ้า, rated torque , maximum torque หรือค่าความเฉื่อย ดูได้จากคู่มือ data sheet ของเซอร์โวมอเตอร์
การประยุกต์ใช้เซอร์โวมอเตอร์แบบ rotary ในงานต่างๆ
1. เครื่องจักรที่ต้องการควบคุมตำแหน่ง (position control )
 รูปที่ 15
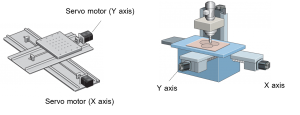
รูปที่ 15
รูปที่ 15 XY table เป็นการใช้เซอร์โวแบบสองแกนคือแกน X และแกน Y ตัวอย่างเครื่องจักรเช่น เชื่อมแผ่นเหล็ก เชื่อมโครงเหล็ก งานเจาะ เป็นต้น
 รูปที่ 16
รูปที่ 16
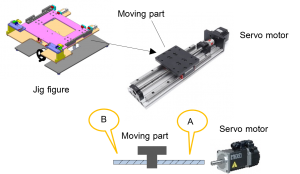
รูปที่ 16 เป็นการใช้ servo motor ขับ ball screw โดยต้องการให้ moving part เคลื่อนที่จากจุด A ไปยังจุด B ,moving part คือ part ที่เคลื่อนที่แบบเส้นตรงโดยใช้การหมุนของ ball screw ซึ่ง moving part ก็สามารถนำโหลดอื่นมาติดตั้งได้ เช่น jig figure เป็นต้น
 รูปที่ 17
รูปที่ 17
รูปที่ 17
transportation machine (vertical) เช่น lifter ซึ่งเป็นเครื่องจักรสำหรับยกชิ้นงานขึ้นลงในแนวดิ่ง
 รูปที่ 18
รูปที่ 18
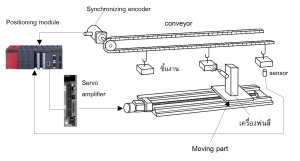
จากรูป 18 ชิ้นงานจะถูกลำเลียงโดย conveyor แบบโซ่ โดยมีเครื่องพ่นสีอยู่บน moving part ของชุด ball screw
ความเร็วของ moving part จะต้องแปรตามความเร็วของ conveyor คือเมื่อปรับความเร็ว conveyor มากขึ้น ความเร็ว moving part จะต้องเพิ่มตาม ซึ่งทำได้โดยการใช้ encoder ในการ synchronize ความเร็วระหว่างสองระบบ
 รูปที่ 19
รูปที่ 19
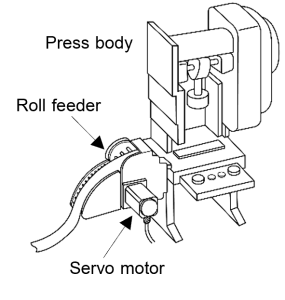
Press roll feeder รูปที่ 19 เป็นการใช้ AC servo motor ขับ roll feeder เพื่อจ่ายวัสดุด้วยระยะที่คงที่ วัสดุจะถูกจ่ายไปยังเครื่อง press body
 รูปที่ 20
รูปที่ 20
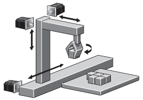
robot รูป 20 เป็นการใช้ servo motor ทำเป็น Robot แบบ X Y Z
เครื่องจักรที่ต้องการควบคุมความเร็ว
คือการเน้นไปที่การควบคุมความเร็วของ servo motor, servo motor จะมีความกว้างของการควบคุมความเร็วที่มากกว่ามอเตอร์ทั่วไป โดยมี range ของการควบคุมอยู่ที่ 1 :1000 ถึง 1 : 5000 และมีความผันแปรอยู่ที่ 0.01 % การควบคุมแบบความเร็วเรียกว่า speed control
 รูปที่ 21
รูปที่ 21
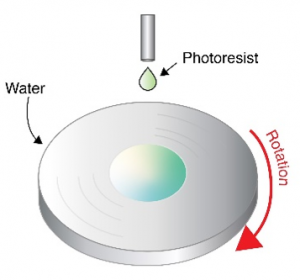
spin coating รูปที่ 21 เป็นการหยด photosensitizing agent (photoresist) บน semiconductor wafer เมื่อของเหลวหยดบนแผ่น จะกระจายตัวออกไปจากจุดศูนย์กลาง กรณีความเร็วการหมุนมากเกินไป ของเหลวจะกระจายออกไปมาก ถ้าความเร็วช้าไป ของเหลวจะกระจายตัวได้ไม่ดี
 รูปที่ 22
รูปที่ 22
Belt Conveyor รูปที่ 22 เป็น การใช้ servo motor ขับ conveyor แบบสายพาน ซึ่งมีข้อดีกว่า induction motor คือ จะได้ความเร็วสายพานที่ราบเรียบกว่า
เครื่องจักรที่ต้องการควบคุมแรงบิด
การควบคุมแรงบิด (torque control ) ของ servo motor ใช้ในงานที่ต้องการควบคุม tension
 รูปที่ 23
รูปที่ 23
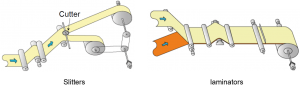
Slitters and laminators รูปที่ 23 เป็น การใช้ servo motor ขับ roller โดยต้องการควบคุมแรงตึงของระบบ เซอร์โวมอเตอร์จะรักษาแรงบิดอย่างเหมาะสมเพื่อให้แผ่นกระดาษหรือแผ่นฟลอยล์มีความตึงที่พอดี
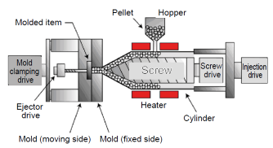
Mold injection machines เนื่องจากเครื่องฉีดพลาสติก มีตัวแปรในเรื่อง pressure เข้ามาเกี่ยวข้องเป็นจำนวนมาก ดังนั้นจะต้องใช้การควบคุมแบบแรงบิดในการจัดการ