
Stepper motor เรียกได้หลายแบบเช่น stepping motor , step motor เป็นต้น
Stepper motor เป็นมอเตอร์ที่ทำงานโดยใช้ไฟฟ้ากระแสตรงสร้างสนามแม่เหล็กที่ stater ส่วนสนามแม่เหล็กที่ rotor ใช้แม่เหล็กถาวร มีส่วนประกอบหลักๆดังรูปที่ 1
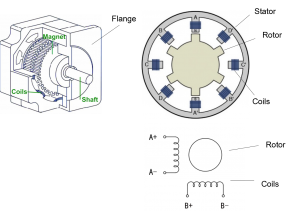
1. Stator คือส่วนหยุดนิ่งที่ใช้สร้างสนามแม่เหล็กเพื่อขับ rotor, stator ประกอบด้วยแผ่นเหล็กบางประกบกันโดยมีขดลวดพันรอบแกนเหล็ก
2. Coils เป็นขวดลวดสำหรับสร้างสนามแม่เหล็ก
3. Rotor คือส่วนที่หมุนเพื่อขับโหลด มีส่วนประกอบสองชนิดคือ เหล็ก(steel) และแม่เหล็กถาวร (permanent magnet )
4. Shaft คือเพลาของมอเตอร์ ใช้สำหรับขับโหลด
5. Flange หรือหน้าแปลน ใช้วัสดุคือ aluminum die cast ใช้สำหรับรองรับ bearing และใช้ยึดระหว่างตัวมอเตอร์และส่วนของโหลด
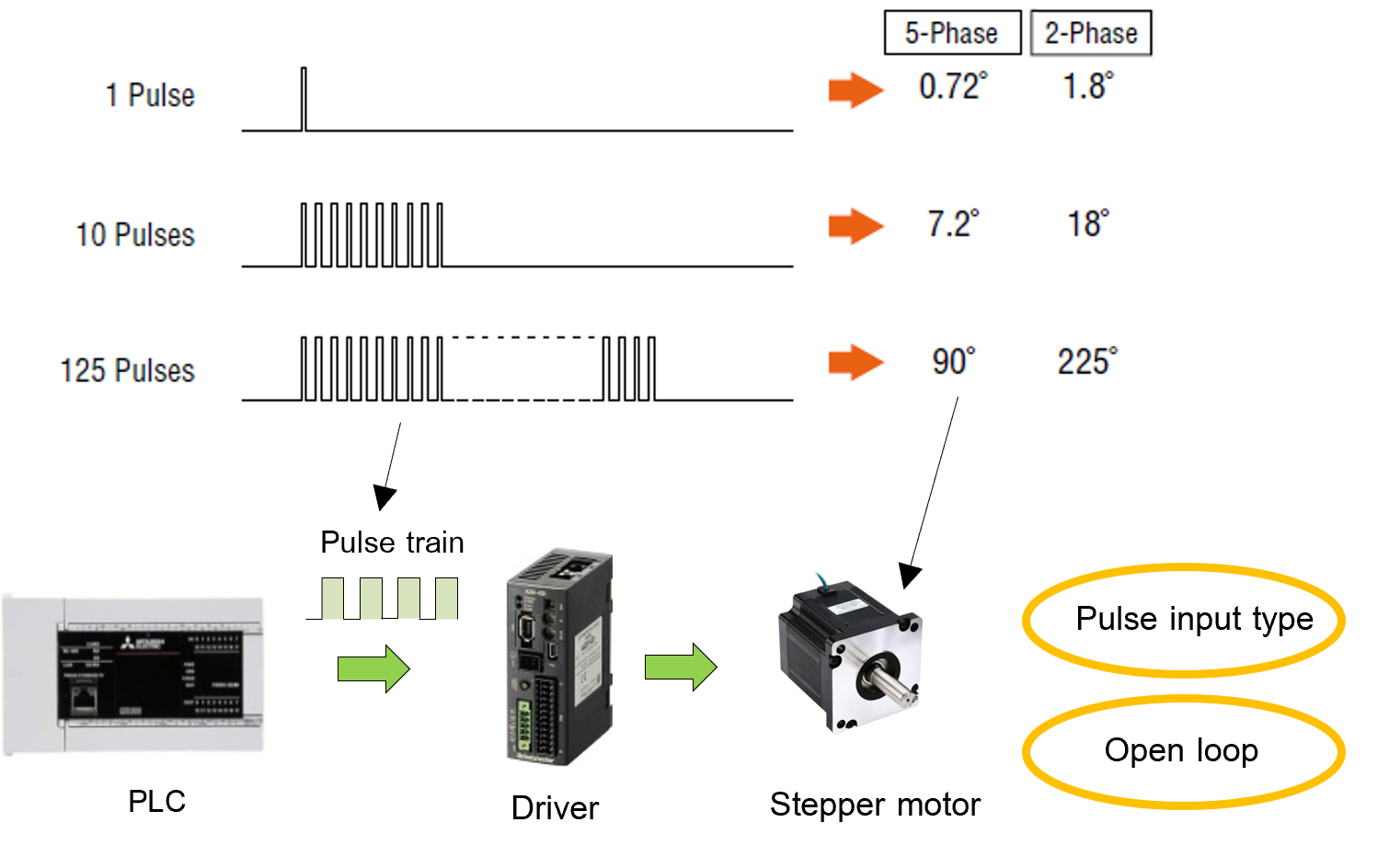
stepper motor เป็นมอเตอร์ที่ทำงานโดยการจ่ายสัญญาณแบบ pulse สามารถควบคุมตำแหน่งและความเร็วได้อย่างละเอียด โดยส่วนใหญ่เป็นการควบคุมแบบ open loop แต่ก็มีบางรุ่นที่ทำงานแบบ close loop คือมี encoder เช่นเดียวกับ servo motor
ประเภทของ Stepper motor
stepper motor มีหลายประเภทคือ
1. Standard Type คือ stepper motor ที่มีความละเอียดการหมุนทั่วไป
2. High-Resolution Type คือ stepper motor ที่มีความละเอียดสูง และมีการลดค่าการสั่นสะเทือนของมอเตอร์
3. Encoder Type คือ stepper motor ที่มีเอ็นโค๊ดเดอร์
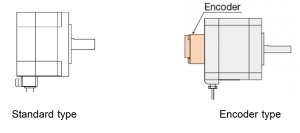 รูปที่ 2
รูปที่ 2
4. Electromagnetic Brake Type คือมอเตอร์ที่มีระบบเบรกแม่เหล็กไฟฟ้า เพื่อป้องกันการหมุนของเพลาในกรณีที่แหล่งจ่ายไฟถูกตัด
5. Geared Type คือมอเตอร์ที่มีชุดเกียร์ในตัว เพื่อให้การเคลื่อนที่ของโหลดราบเรียบขึ้น สามารถเพิ่มแรงบิดได้มากกว่ามอเตอร์แบบไม่มีเกียร์
ข้อแตกต่างระหว่าง stepper motor และ servo motor
1. Stepper motor มีจำนวน poles ที่มากกว่า servo motor
2. แรงบิดของ stepper motor มีค่าสูงกว่า servo motor ( ที่ความเร็วต่ำ) โดยเทียบขนาดพิกัดเท่ากัน
3. ราคาประหยัดกว่า servo motor เนื่องจากไม่มี encoder และความซับซ้อนน้อยกว่า servo และถึงแม้มี encoder ก็จะประหยัดกว่าเนื่องจากความละเอียด encoder น้อยกว่า
อย่างไรก็ตาม stepper motor บางรุ่นก็พัฒนาการทำงานได้เกือบจะเป็นเซอร์โวมอเตอร์ได้เช่นกัน เช่นยี่ห้อ Orentral motor
Stepper motor driver
การควบคุม stepper motor จะต้องใช้อุปกรณ์จ่ายพัลส์ให้กับมอเตอร์ ซึ่งเรียกได้หลายแบบเช่น stepping motor drive, driver หรือ amplifier เป็นต้น driver มีสองแบบคือ
1. Driver แบบ pulse train input คือ driver ที่รับสัญญาณ pulse train จากอุปกรณ์ controller เช่น PLC
 รูปที่ 3
รูปที่ 3
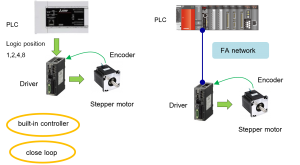
2. Driver แบบ built-in controller คือ driver ที่มีฟังก์ชันควบคุมตำแหน่งในตัวเอง โดยไม่ต้องรับสัญญาณแบบพัลส์ ซึ่ง stepper motor จะต้องมี encoder ด้วย การกำหนดตำแหน่งทำได้ง่ายกว่าแบบแรก การตั้งค่า parameter ของ driver จะต้องใช้ software
การ link ระหว่าง PLC กับ driver แบบ built-in controller เช่น link แบบ I/O โดยส่งค่าตำแหน่งที่เป็นเลขฐานกับ input ของ controller โดยตรง หรือใช้การ interface แบบ network เช่น Modbus(RTU),CC-Link, EtherCAT, MECHATROLINK เป็นต้น
 รูปที่ 4
รูปที่ 4
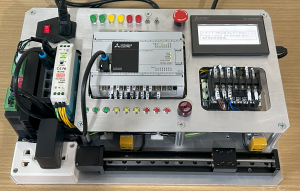
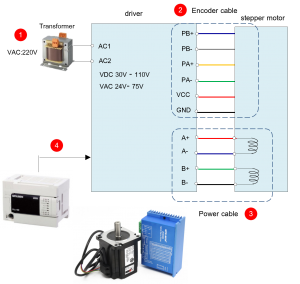
การวายริ่ง Stepper driver 2HSS86H
Stepper driver 2HSS86H คือ driver แบบ pulse train input การวายริ่งประกอบด้วย
1. การวายริ่ง power input ของ driver เป็นการจ่ายไฟให้กับ driver ในรูปที่ 5 ใช้ไฟแบบ AC
2. การวายริ่งสาย Encoder ระหว่าง driver และ stepper motor
3. การวายริ่งสาย power ระหว่าง driver และ stepper motor
4. การจ่ายสัญญาณ pulse train ไปยัง driver ใช้การ connection แบบ open collector connection โดยต่อได้ทั้งแบบ sink และ source , และการวายริ่งสัญญาณทิศทาง DIR-, DIR+
 รูปที่ 5
รูปที่ 5
การวายริ่ง power input กับ stepper driver 2HSS86H สามารถใช้ไฟได้สองแบบคือ 24V ถึง 75VAC หรือ 30V ถึง 110VDC ดังนั้นจะต้องใช้หม้อแปลง (transformer) ในการจ่ายไฟ
stepper driver 2HSS86H เป็นรุ่นที่ใช้มอเตอร์แบบมี encoder ดังนั้นจึงต้องวายริ่ง encoder ด้วย ส่วนขั้ว A+, A-, B+ และ B- คือ cable สำหรับจ่ายไฟให้ motor
การวายริ่งสัญญาณ pulse train และ direction
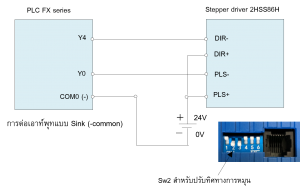
1. การวายริ่งแบบ sink (Common-anode )
 รูปที่ 6
รูปที่ 6
รูปที่ 6 เป็นการวายริ่งระหว่าง PLC กับ driver แบบ sink โดยใช้ Y0 จ่าย pulse train ซึ่งต่อกับขา PLS- ส่วนขาทิศทางใช้ Y4 ต่อกับ DIR- การปรับทิศทางการหมุนนอกจากการ ON-OFF ขา DIR- แล้ว ยังขึ้นอยู่กับการปรับตำแหน่งสวิตช์ที่ driver ด้วย
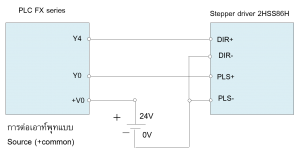
2. การวายริ่งแบบ source ( PNP signal ) หรือ Common-cathode
 รูปที่ 7
รูปที่ 7
ตัวอย่างรูปที่ 7 เป็นการวายริ่งระหว่าง PLC กับ driver แบบ source โดยใช้ Y0 จ่าย pulse train ซึ่งต่อกับขา PLS+ ส่วนขาทิศทางใช้ Y4 ต่อกับ DIR+
การวายริ่ง Stepper driver (Microstep) แบบใช้ไฟ Input DC24V
การวายริ่งประกอบด้วย
1. การวายริ่ง power input ของ driver เป็นการจ่ายไฟให้กับ driver ในรูปที่ 8 ใช้ไฟ 24VDC
2. การวายริ่งระหว่าง driver และ stepper motor คือการจ่ายไฟจาก driver ไปยัง stator ของมอเตอร์
3. การจ่ายสัญญาณ pulse train ไปยัง driver ใช้การ connection แบบ open collector connection โดยต่อได้ทั้งแบบ sink และ source
4. การวายริ่งสัญญาณทิศทาง DIR-, DIR+
 รูปที่ 8
รูปที่ 8
รูปที่ 8 stepper driver M542C เป็นรุ่นที่ใช้ไฟ DC 24V-48V ขั้ว A+, A-, B+ และ B- คือ cable สำหรับจ่ายไฟให้ motor
การวายริ่ง Stepper driver (Microstep)
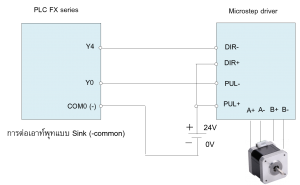
1. การวายริ่งแบบ sink
 รูปที่ 9
รูปที่ 9
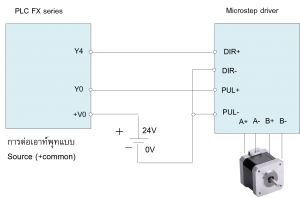
ตัวอย่างรูปที่ 9 เป็นการวายริ่งระหว่าง PLC กับ driver แบบ sink โดยใช้ Y0 จ่าย pulse train ซึ่งต่อกับขา PUL- ส่วนขาทิศทางใช้ Y4 ต่อกับ DIR-
2. การวายริ่งแบบ source
 รูปที่ 10
รูปที่ 10
ตัวอย่างรูปที่ 10 เป็นการวายริ่งระหว่าง PLC กับ driver แบบ source
Resolution of stepper motor (Pt) , หน่วย pulse/rev
 รูปที่ 11
รูปที่ 11
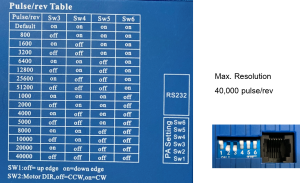
ค่าความละเอียดของ stepper motor ( ทั้งที่มีและไม่มี encoder) ดูได้จากสเปกของ driver ที่ใช้ขับมอเตอร์นั้นๆ รูปที่ 11 ค่าความละเอียดของ motor ที่ใช้กับ driver 2HSS86H สามารถตั้งค่าได้ตั้งแต่ 800 pulse/rev ถึง 40,000 pulse/rev การตั้งค่าทำได้โดยการเลือก ON sw3 ถึง sw6 เช่นถ้าต้องการตั้งค่าที่ 20,000 pls/rev ทำได้โดยการ ON sw3 ส่วน sw4 ถึง sw6 ตั้งเป็น off
 รูปที่ 12
รูปที่ 12
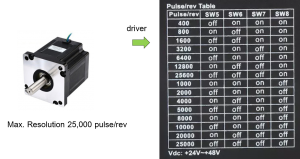
รูปที่ 12 เป็น driver ของ Microstep ค่าความละเอียดตั้งค่าได้ตั้งแต่ 400 pulse/rev ถึง 25,000 pulse/rev
 รูปที่ 13
รูปที่ 13
 รูปที่ 14
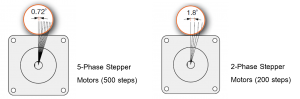
รูปที่ 14ค่าความละเอียดของ stepper motor จะขึ้นอยู่กับประเภทของ stepper motor รูปที่ 11.15เป็น stepper motor ของ ORIENTAL MOTOR โดยมอเตอร์แบบ 5-Phase จะมีค่าความละเอียดที่ 500 step ต่อการหมุน 1 รอบ แต่ละ step เคลื่อนที่ได้ 0.72 องศา (จ่ายพัลส์ให้ driver 1 พัลส์ ทำให้มอเตอร์หมุน 1 step ) ส่วนมอเตอร์แบบ 2 phase จะมีค่าความละเอียดที่ 200 step ต่อการหมุน 1 รอบ
 สมการที่ 1
สมการที่ 1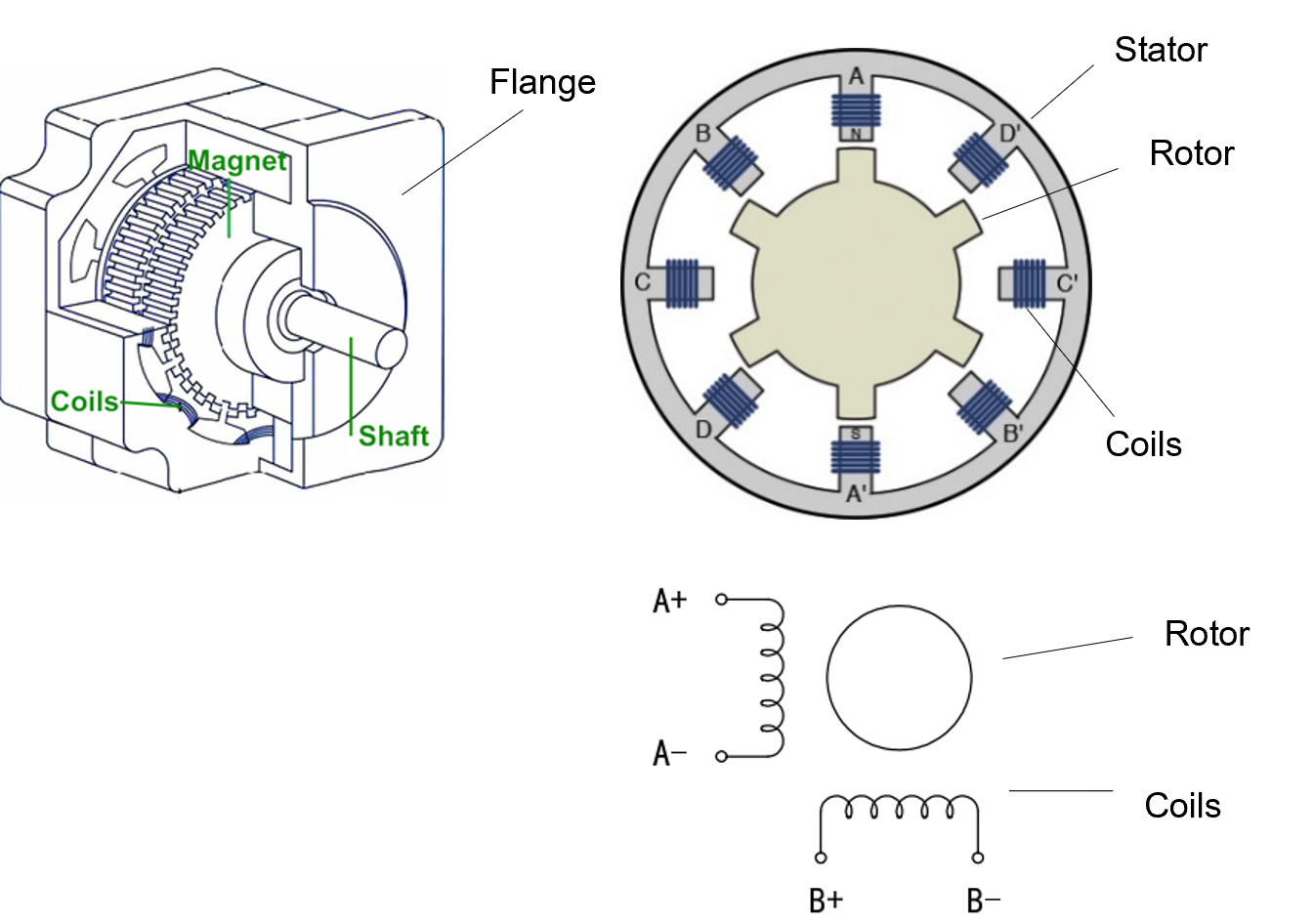{kind=link}
ค่าองศาต่อ 1 pulse ว่า step angle (𝜃s) สมการที่ 1 แสดงความสัมพันธ์ระหว่างมุมของการหมุน 1 รอบ , step angle และจำนวนพัลส์ต่อรอบ
𝜃 คือมุมในการหมุนของเพลามอเตอร์ มีหน่วยเป็นองศา (deg)
𝜃S = step angle (deg/step )
Pt = ค่าความละเอียดของ stepper motor (pulses/r)
Stepper motor speed (N0)
ความเร็วของ stepper motor ใช้ตัวย่อ N0 มีหน่วยเป็นรอบต่อนาที (r/min)หรือใช้ตัวย่อ rpm เช่น มอเตอร์หมุนด้วยความเร็ว 180rpm (180 r/min) หมายถึงใน 1 นาที มอเตอร์หมุนได้ 180 รอบ ความเร็วรอบหาได้จากสมการที่ 2
 สมการที่ 2
สมการที่ 2
N0 : speed of motor output shaft (r/min )
𝜃s : Step angle (deg/step)
f0 : pulse speed (Hz)
ตัวอย่างการคำนวนความเร็ว Stepper motor (N0)
1. ค่า step angle หาได้จาก
2. ค่า N0 หาได้จาก
จากสมการจะได้ค่า N0 เท่ากับ 72 rpm
 รูปที่ 15
รูปที่ 15